The topic was previously examined by the author in [1,2]. Linked to the 1978 publication, the SAE Motorcycle Dynamics Subcommittee compiled a bibliography [3], and both reviews include numerous references. These articles provide a comprehensive historical overview. Therefore, this paper aims to focus on explaining and consolidating the earlier findings while incorporating recent advancements.
The primary focus will be on general issues, though some content regarding variations between different motorcycles, particularly concerning larger machines, will be included. The motorcycle and rider will be analyzed as an integrated man-machine system, emphasizing their significant interactions. The rider plays a crucial role, affecting the system’s structural properties, providing stabilization, and offering guidance control. Control inputs available to the rider include steer angle, steering torque, and body lean torque.
The rider’s control situation is heavily influenced by the stability of the uncontrolled rider/motorcycle system, which must be thoroughly examined first. Initially, stability will be discussed in the context of linear systems and small perturbations, followed by a focus on maneuvering, including steady turning and transient responses. Additionally, rider capabilities and preferences, as well as machine properties from a handling perspective, will be addressed. Potential challenges posed by specific external disturbances will also be considered.
The previous review [2] noted that “in terms of straight-line stability and response properties, there is a broad consensus between the best theory and experiments concerning stability and damping, natural frequencies, mode shapes, and frequency response across various speeds and design parameters for large motorcycles, with no significant discrepancies between theory and practice.” This insight frames the present paper. After a general discussion on motorcycle steering, a cutting-edge handling model is introduced. The model’s features are used to emphasize the key attributes that significantly influence motorcycle behavior.
The rider’s control task can be divided into fixed control and free control. The choice between these modes depends on the relative challenges each presents. The relevant vibration modal properties differ based on whether the steering system is fixed or free. With the steering system fixed (in the straight-ahead position), the motorcycle and rider exhibit roll instability at all speeds, characterized by a real eigenvalue close to 3.5 s. This roll instability resembles that of an inverted pendulum or a capsizing ship. Such a mode might be countered by a highly attentive rider who would need to steer into the fall, generating rolling moments through the tire/ground contact forces. This arrangement is unsuitable for road vehicles due to obvious limitations.
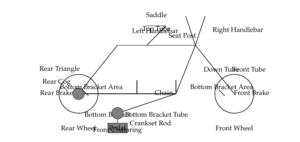
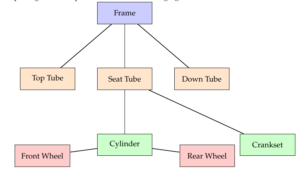
In the free control mode, the steering system can steer itself, potentially alleviating the rider’s need to perform stabilization steering. For effective self-steering, the steering head bearings must be very free, but for structural integrity and stability, no clearance should be present. The design and adjustment of the head bearings are critical. Assuming the steering joint is free, various factors influence self-steering when the motorcycle rolls, as seen in the equations of motion of a mathematical model of the system. Key factors include steering moments from the front tire aligning moment, overturning moment, side force, gravitational force on the front frame, front tire load, front wheel spin gyroscopics, and various inertial effects. The impact of these factors is speed-dependent, with gyroscopics increasing with speed. These influences depend on design details such as the steering head angle, trail, mass distribution, front wheel spin inertia, and front tire properties. However, self-steering can lead to oscillations. An effective motorcycle must self-steer adequately, contributing to automatic stabilization without excessive oscillations under certain conditions.
Let’s first consider straight running behavior. At very low speeds, a motorcycle with free control is divergently unstable. Typically, this results in two real positive eigenvalues: one related to roll instability of the fixed-steer machine (often associated with ‘capsizing’), and the other related to the steering system diverging towards full-lock under gravity, observable with the machine on its center stand and front tire off the ground [4]. With a slight increase in speed, these two real roots merge into a complex conjugate pair with a positive real part. As speed increases to around 7 m/s, this mode typically stabilizes, with a frequency of about 0.8 Hz. These findings are relatively independent of modeling details, so further debate on this is not necessary at this stage. As speed continues to rise, the behavior of the mode depends on the rider’s representation as a structure, to be discussed later. At high speeds, a lightly damped mode with a frequency around 3 Hz, known as the weave mode, emerges. Lateral flexibility between the powertrain mass and the rear tire/ground contact area can reduce damping of the weave mode at high speeds, though modern machines are likely sufficiently stiff, with minimal gains from further stiffening. Similarly, lateral flexibility between the powertrain mass and the front tire contact point can destabilize the high-speed weave, but contemporary machines are generally stiff enough and likely operate in a low-sensitivity region.
The free-control motorcycle also features a higher frequency oscillatory mode, often referred to as the ‘wobble’ mode. This oscillation frequency is primarily determined by the inertia of the steering assembly about the steer axis, mechanical trail, and front tire cornering stiffness. Viewing the front frame as a castor oscillating about a fixed, inclined steering axis provides a reasonable approximation [4]. The frequency typically ranges from around 5 Hz for heavyweight machines to 9 Hz for lighter ones, with minimal dependence on speed. The damping factor is heavily influenced by the steering head’s boundary conditions, which are not fixed in practice. Steering dampers contribute to stabilization, and the main frame stiffness, affecting the connection between the steering system and the engine/transmission unit mass, influences the steering head condition perceived by the front frame. The least damped condition may occur at moderate or high speeds, depending largely on frame stiffness and distribution, with recent advances in telescopic fork systems making them much stiffer. Additionally, some manufacturers have adopted fundamentally different mechanical arrangements for front suspension http://www.bmw-motorrad.com/international/en/.
In-plane modes are decoupled from out-of-plane modes and are less sensitive to speed changes. As motorcycle speed increases, aerodynamic loading, proportional to speed squared, leads to modest lift and a significant pitching moment, causing a decrease in front wheel load and an increase in rear wheel load. Although the machine geometry changes slightly due to equilibrium states of the suspensions, these changes do not significantly alter the modes. In-plane modes include pitch, bounce, front hop, and rear hop, typically in combination, while out-of-plane (lateral) modes are affected only minimally by these loading and geometry changes.
Sensitivities of the straight-line weave mode damping to variations in motorcycle configuration[5], are illustrated in Figure 1. The datum motorcycle at 130 km/h represents 100%, with results also provided for cases where damping remains positive at 160 km/h. A value of 0% indicates operation at the stability boundary.
As the lean angle and lateral acceleration increase from the trim state for small perturbations, the distinction between in-plane and out-of-plane modes diminishes. The eigenvectors increasingly incorporate contributions from both sets of variables. When in-plane and out-of-plane modes have similar natural frequencies, they tend to merge into combined modes with significant intensity. Key identifiable modes for a cornering motorcycle include capsize, cornering weave, wobble, and patter. These modes involve a combination of pitch, bounce, weave, rider movements, suspension responses, front wheel hop, frame twist, and steering dynamics.
With an increasing lean angle during a steady turn, the characteristic low-speed divergent instability tends to become more pronounced [6]. Typically, the rider needs to focus more on stabilization at lower speeds and larger lean angles. Under different circumstances, the additional effort required from the rider for stabilization beyond guidance may be minimal.
Evidence regarding cornering weave and patter modes is somewhat limited. Cornering weave has been documented by [7], as referenced in [2], and captured on video, particularly in scenarios involving road undulations and bends known to challenge this mode [6]. For a given speed, cornering weave may exhibit reduced damping compared to straight running, with damping decreasing as the lean angle increases, depending on the conditions. According to [8], ineffective rear suspension dampers destabilize the cornering weave, a finding also supported []. Conversely, [3,5] predicted the opposite effect. Subsequent attempts to reproduce Koenen’s results using updated software tools [] have not confirmed his predictions, instead aligning with [2-4], and general experience regarding the effect of suspension dampers on cornering weave. Currently, information on patter is mostly anecdotal. However, a feedback-controlled active rear suspension system has demonstrated significant effectiveness in stabilizing the cornering weave mode through the use of a speed-adaptive control law [2].
When a motorcycle operates in an unstable state, the rider’s control is crucial. If the rider stops providing stabilizing control, a turn may develop randomly and slowly. However, in practice, riders need to exert more control to initiate a deliberate turn. To turn right, the rider applies an initial leftward steer torque, which causes the front tire to camber and sideslip, generating a leftward force. This force creates a roll moment, enabling the motorcycle to lean into the turn without losing balance. To exit a turn, the rider must reverse the transient motion sequence. If the motorcycle is initially stable, the rider must initiate a maneuver with steering or leaning control to avoid maintaining a straight course.
Steady turn responses can be calculated to determine stability parameters for small perturbations. In steady turning, forward speed and yaw rate imply lateral acceleration and lean angle. Steer angles are typically small, and steer torque required is usually minimal.
Frequency responses to rider control torques and rotating wheel imperfections can be computed or measured using linear models and experimental methods. However, interpreting these complex results can be challenging.
Steering torques required for rapid maneuvers are more meaningful and typically much greater than those needed for steady turning. Counter-steering slows down motorcycle transient responses compared to two-track vehicles. Designing motorcycles that balance stability, speed of response, and steering torque input is crucial. Designing motorcycles that balance stability, speed of response, and steering torque input is crucial. This requires careful consideration of factors such as frame stiffness, wheel rotation frequency, and wobble mode natural frequency. Compromising stability for faster response and reduced steering torque input may be necessary to achieve optimal performance.
Rider control is essential for motorcycle stability and maneuverability. The rider’s ability to detect low friction conditions through steering feel is limited, making it challenging to adjust control inputs accordingly. Understanding the complex relationships between rider control inputs, motorcycle speed, and forcing frequency is vital for optimal performance.
Motorcycles can operate in various stability modes, including divergent, stable, and oscillatory modes. Understanding these modes and their characteristics is essential for designing motorcycles that balance stability and maneuverability.
Tyre-ground interaction forces play a critical role in motorcycle stability and control. Understanding these forces and their impact on steering torque requirements is vital for designing motorcycles that can handle various road conditions. Experimental methods, such as measuring frequency responses to rider control torques and rotating wheel imperfections, can provide valuable insights into motorcycle dynamics. However, interpreting these complex results requires careful consideration of various factors, including motorcycle speed and forcing frequency.
Motorcycle stability and control are complex phenomena that require careful consideration of various factors, including rider control inputs, motorcycle speed, and tyre-ground interaction forces. Understanding these factors and their relationships is essential for designing motorcycles that balance stability, speed of response, and maneuverability. By compromising stability for faster response and reduced steering torque input, motorcycle designers can create vehicles that perform optimally in various road conditions.